Over the past year, we have watched ideas spring forth from one basic design and turn into numerous variations and devices. One of the most active designers in the e-NABLE community is Peter Binkley who is the brilliant mind behind the Talon and Ody hands and has now released another incredible design that he has named “The Flextensor.”
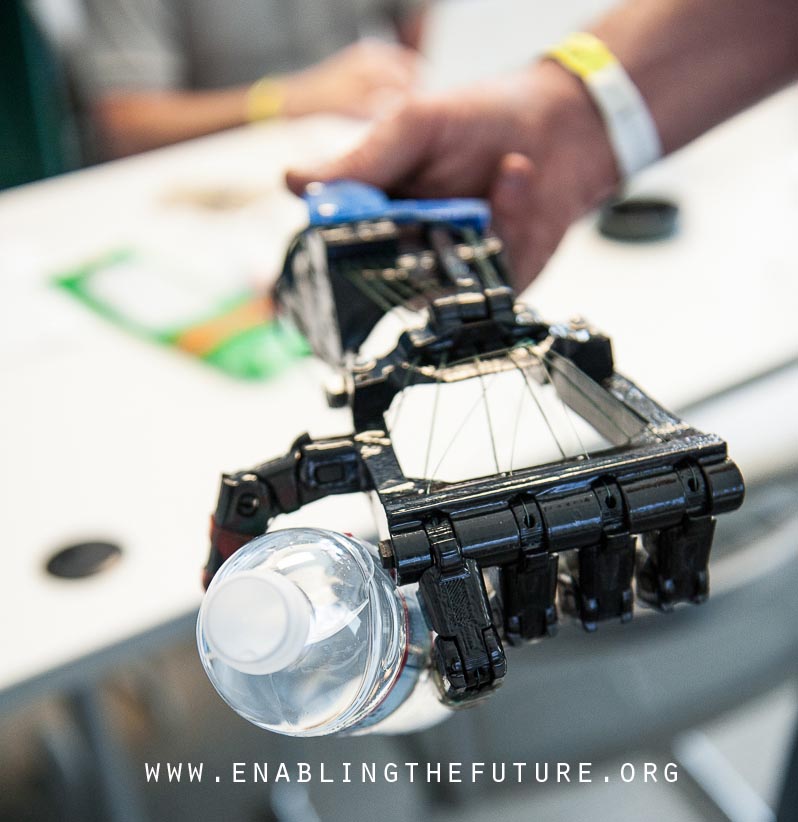
As you can see in the images above and below – it does not require the wrist to use force to pick up items as it has removed the need for elastics. The hand was able to hold objects without any assistance of a hand or wrist inside to “Power” it – including a completely full and unopened bottle of water.
Peter writes:
“In the summer of 2013, my son Peregrine and I saw a video of Liam, a little boy who was born without fingers on one hand, just like Peregrine. He was wearing a mechanical 3D printed hand and using it to pick up objects. We downloaded and printed off a Snap-Pin Robohand and fitted it to him by cutting and heat-bending the plastic parts, then mounting them onto a leather “shoe and sleeve”. Thus began our journey with open-source assistive devices. The fingers close via cables that run on the front side of mechanical fingers, and they open via elastics that run in channels on the back side of those fingers.
After wearing and using his new hand, Peregrine started making suggestions to improve the design. One of his first wishes after fitting the hand was to somehow reduce or eliminate resistance as he closes his hand. To grasp something small requires a lot of sustained force, since the five elastics fight back with a high level of resistance and that resistance increases as the hand closes more.
And the problem worsens down the road, since most elastics quickly degrade, especially under stress. As elastics lose their springiness, they need to be shortened to effectively open the hand – which increases the problem of ramping resistance and decreasing the distance of stretch before the elastics “bottom out.”
I started looking into ways to reduce or eliminate resistance.
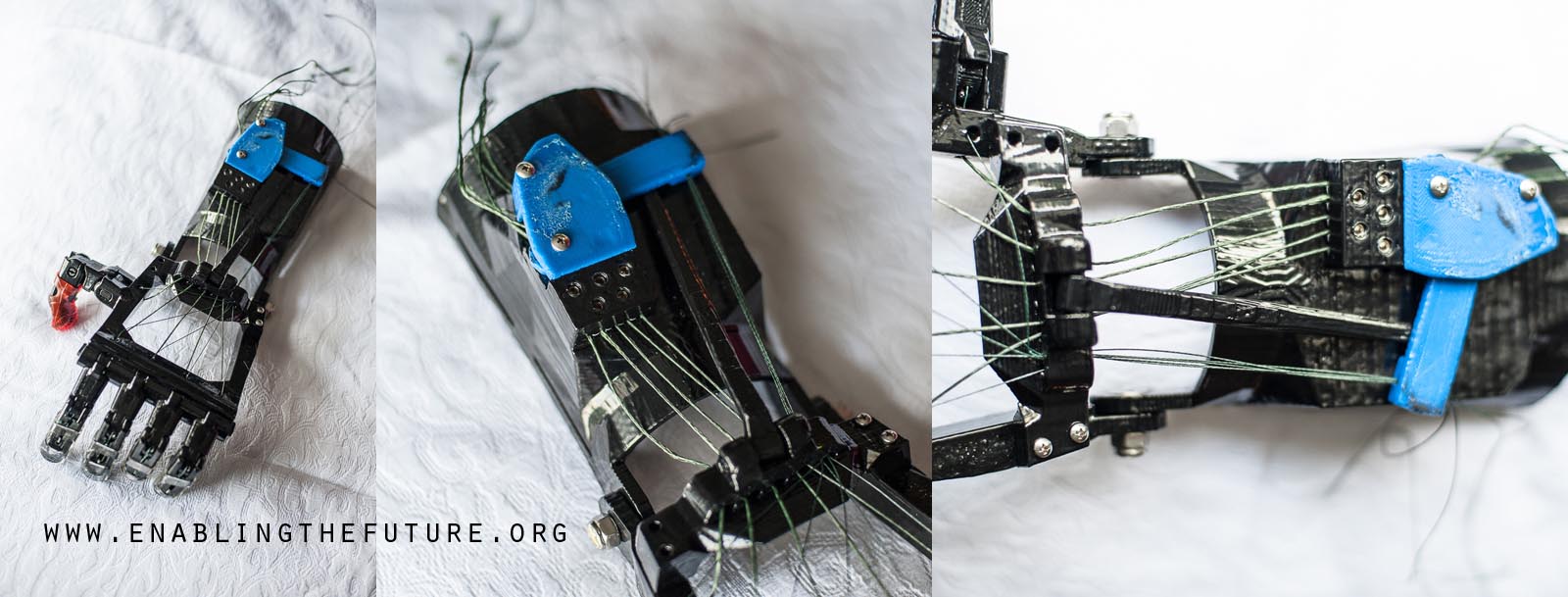
The quickest help was to make the run of the elastics longer and straighter. I made channels that run along the top of the knuckles and installed eye screws on the cable guide. A much longer length of elastic is used so that the device doesn’t use as much of the play of the elastic, reducing the ramping of resistance.
But another idea was trying to form in my head; a mechanical solution that would completely eliminate elastic resistance. In early November 2013, after tossing ideas around, I sketched a mechanical device on a piece of paper. As the idea took shape, it occurred to me that such a device would be superior from a therapeutic standpoint – since the user works both the flexors and extensors of the wrist.
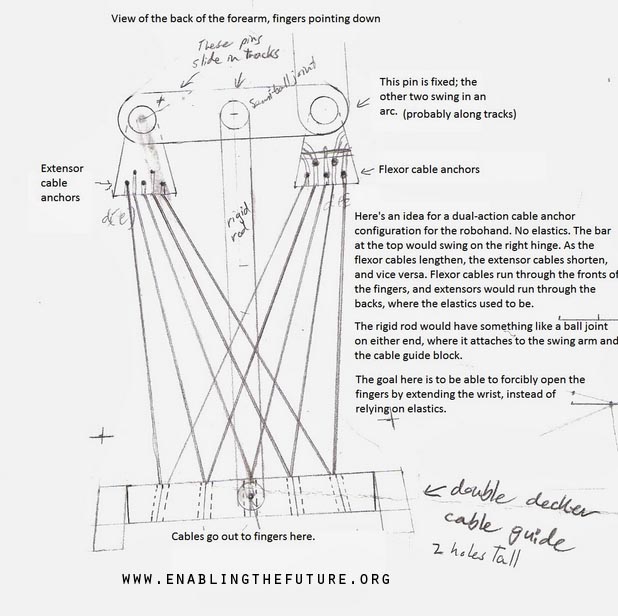
It was just an ugly drawing, which nobody seemed to understand at first – so I started modeling in Blender.
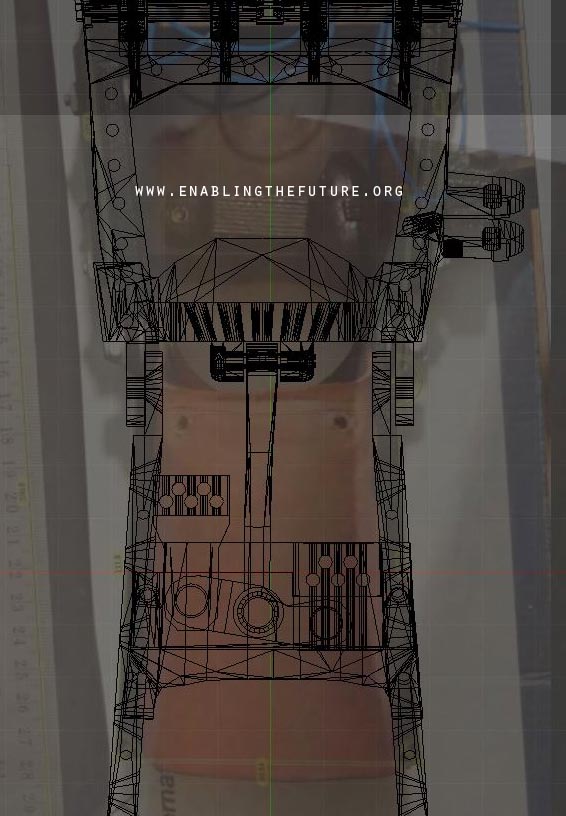
Here is the progression of Flextender designs:
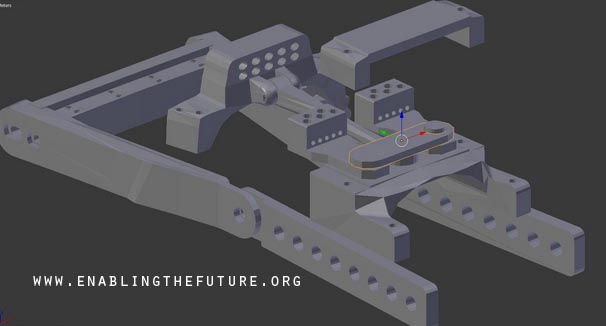
Strength issues with the first one and too many moving parts. So I joined the flexor block with the base.
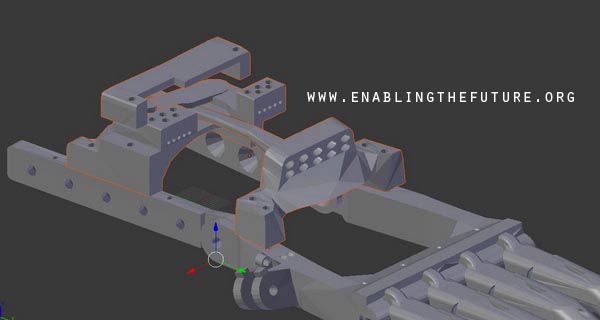
The extensor was still too complicated here. I decided to have all the extensor lines anchoring through the same hole.
Then I joined the extensor block with the pivot to further simplify the design.
I’m pretty satisfied with the mechanics – but need to focus on lowering the profile to make it a more compact fit. I also plan to incorporate a tensioner block instead of the set screw cable anchor I’ve been using. Then I’ll need to stress test it and make sue it will hold up to heavy use.
With the next version, I am changing the name to Flextensor, since it does the job of both a flexor and extensor.
I would love for some of our very talented friends to put some energy into this type of extension system!”
You can find the “Thing Files” on Peter’s Thingiverse page.
He is “Profbink” – HERE.
Flextensor files can be found HERE.
If you make one – please let us know! We would love to see it and Peter would love some feedback and some folks to test it for him!