
Since 2012, e-NABLE Volunteers have been working hard to design free and low-cost assistive devices that can be created on a 3D printer for those who are missing their hands and arms. To date, we estimate that there have been over 8000 free 3D printed devices given to those in need in over 100 countries worldwide, mostly in underserved communities.
Quietly designing in the background, one of our lead designers and e-NABLE volunteers, Peter Binkley, has been working on a project to help children who still have their fully intact hands and arms, but who have lost function in them due to complications from Epilepsy.
Some children develop a kind of epilepsy that doesn’t respond to drugs, and that can cause a high number of dangerous seizures. For some of them, hemispherectomy, the removal of most or all of one hemisphere of the brain, is the only currently available option for survival. So the surgery is traumatic, but life-saving. The Brain Recovery Project is an organization that serves the hemispherectomy community with a broad range of services and resources.
The Brain Recovery Project
Peter shares, “In early 2016, I was approached by the Brain Recovery Project. They wanted me to pick up on Elizabeth Jackson’s amazing Airy Arm project. Elizabeth created a wearable arm that allowed a user to open his paralyzed fingers. They wanted something with a similar action. That is, a wearable device that opens the fingers via an extension of the elbow. The BRP wanted me to design a more low-profile, easy-to-wear solution. In September, I began sketching ideas for the Frog Arm.”
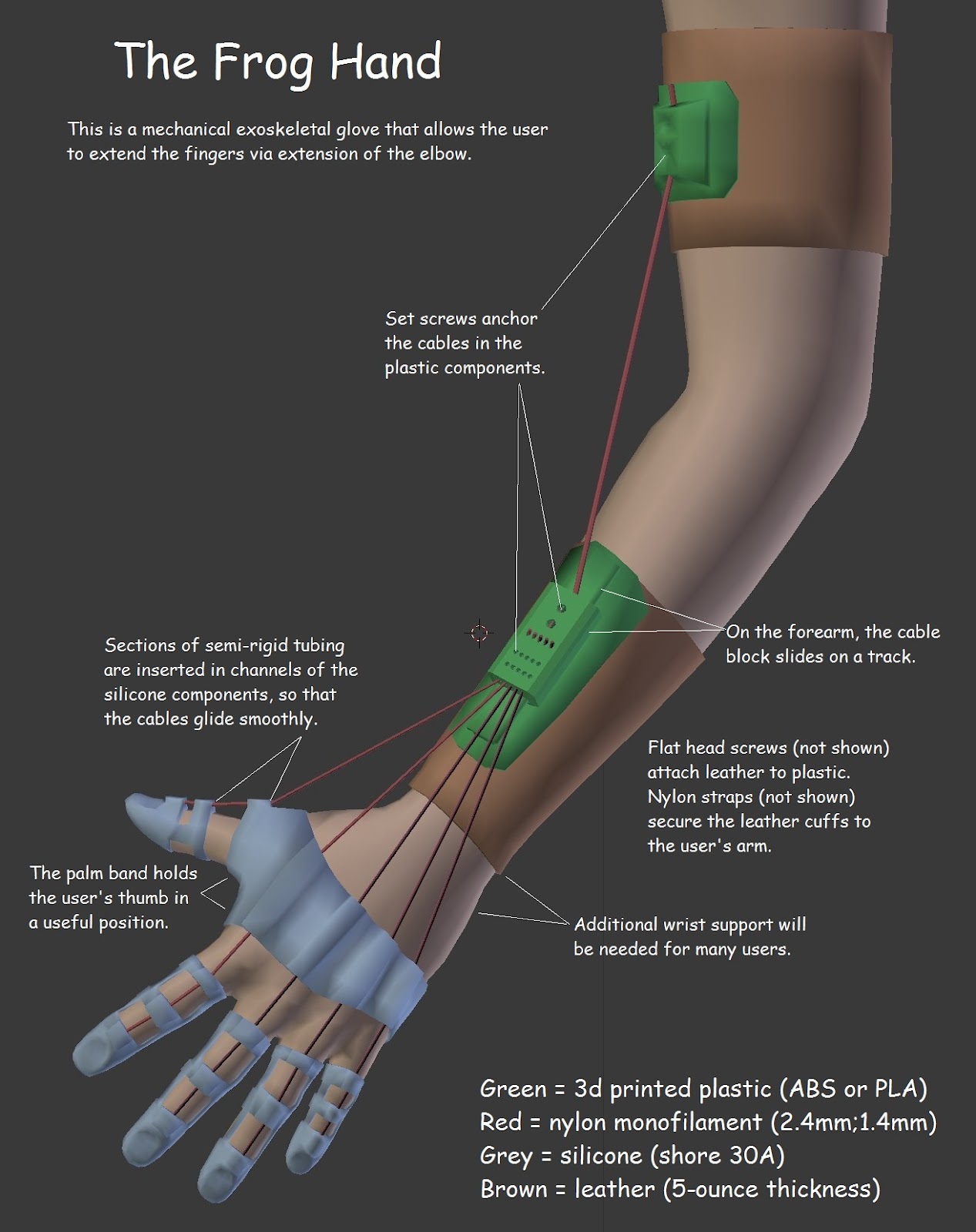
He goes on to explain, “Frog Hand (Frog Arm 0.1) would have been too difficult to manufacture. And I hadn’t even met a test pilot for the device yet, so I had a lot to learn.”

“I met with my test pilot a couple of times to take measurements”, explains Peter. “Cameron is an amazing person. She has excelled socially and academically in spite of having had a large part of her right hemisphere removed when she was a young child.”

In their first couple of meetings, Peter was able to get some good sizing photos and casting of Cameron’s affected hand.

Cameron’s hands are pretty close in size, so he took this photo of her right hand and mirrored it.

They then met at Duke University to take an alginate/plaster casting.


Cameron has no muscle enervation and limited sensory enervation distal to the elbow. She is able to move her elbow, but cannot rotate or move the wrist, hand, or fingers at all.
Frog Arm Version 0.2
Peter began prototyping with 3d printed plastic, leather, screws and cabling. He shares, “Here’s version 0.2. I was trying to make a device that could give users control of the wrist. With paralyzed tendons, flexing the wrist extends the fingers and extending the wrist flexes the fingers. I was trying to use that biomechanical fact to advantage. Large hair elastics hold the wrist in extension, so the normal position of the hand is closed. When the user extends the elbow, it pulls a cable that flexes the wrist, thereby opening the fingers.”



Frog Arm Version 0.3
The leather hand strap on version 0.2 didn’t fit properly, and Peter felt that a hinge would be needed to stabilize the deviation of the wrist. He also noted that the elastic tension needed to be adjustable. So on to version 0.3. Peter modeled and printed forming blocks so he could thermoform the hinges.




The elastics are fully adjustable and the wrist moves in alignment with the hinge of the device. The fit is actually pretty good. The problem that Peter ran into is that Cameron’s wrist and fingers are both almost fully flexed at rest. So they weren’t able to achieve enough additional wrist flexion to get the fingers open.

Peter says, “I had to take a different approach. The dynamic between the wrist and the fingers is an important lesson. It requires that the fingers only be moved in relation to the carpals, and not in relation to the forearm. So the wrist must be free to flex and extend during actuation.“
Frog Arm Version 0.4
“The leap from version 0.3 to 0.4 was a big one. I had to attach directly to the fingers somehow. It seemed to me that Cameron’s only needed to be able to actively open her fingers, since they close on their own and remain closed at rest”, explains Peter.

Here’s the beginning of version 0.4. Peter printed the hand component flat and thermoformed it around the plaster casting of Cameron’s hand. He then decided to use a hinge across the elbow to pull the cable and a nylon tube to act like a brake line. That way the fingers are able to actuate relative to the carpals, (the palm of the hand) but not bound to the forearm.
Peter also decided to use little leather cots around the fingers. These are distressed goat hide, which is very thin and soft, but very strong.




“My friend Jen tried it on. You can see that the forearm side of the hinge didn’t fit right,” explains Peter.






Frog Arm Version 0.5 | Trying The Frog Arm With Cameron

Peter shares, “The forearm didn’t fit Cameron either. I’d need to redesign that. And I felt that the elbow hinge wasn’t generating enough cable traction. I found that moving the screws for the forearm and upper arm components farther from the elbow could solve both problems. Going from version 0.4 to 0.5 was just a matter of tweaking.“

You’ll notice that in this version, pins just proximal to the thumb tube hold the thumb cable stationary while just the first three fingers open upon elbow extension.








Peter asked Cameron to extend her elbow to see if she could open her fingers.
Cameron was able to achieve a small amount of finger extension, but since her hand has been paralyzed for so long, opening the fingers takes a lot of force. They decided that for Cameron’s case, the Frog Arm did not provide enough usefulness to her to warrant wearing it regularly. Peter adds, “I was also concerned that she could cause herself damage if she was pulling her fingers open with a lot of force and with limited pain sensation.”
Peter shares, “I’m going to begin working with a different test pilot, someone whose fingers still open without much force. Maybe we will have more luck then.”
Peter also thinks this device could be useful to anyone who has difficulty opening the fingers. Stroke patients and people who have sustained some nerve damage to the hand may be able to benefit either functionally or therapeutically from being able to mechanically open their fingers. More testing is needed to determine what value the Frog Arm might have for different populations.
Please check out the Frog Arm on Thingiverse. There you’ll find all the printable downloadable files, a Blender sizing file for the Frog Arm, and a link to the instructions document.
If you are a physical therapist, physician or hand specialist, please feel free to download these files and test them with your patients and give Peter some feedback! We would love to see this design provide functionality to those in need!
Please keep in mind that this design is an experimental open-source design. Use this design at your own risk and please only use this with the guidance of a medical professional who can help ensure proper fit, adjustments or design improvements.
If you have any questions, please email: profbink@gmail.com.
ACCEPTANCE
By accepting any design, plan, component or assembly related to the so-called “e-NABLE Hand”, I understand and agree that any such information or material furnished by any individual associated with the design team is furnished as is without representation or warranties of any kind, express or implied, and is intended to be a gift for the sole purpose of evaluating various design iterations, ideas and modifications. I understand that such improvements are intended to benefit individuals having specific disabilities and are not intended, and shall not be used, for commercial use. I further understand and agree that any individual associated with e-NABLE organization shall not be liable for any injuries or damages resulting from the use of any of the materials related to the e-NABLE hand.